
Table of Links
Supplementary Material
-
Image matting
-
Video matting
8.3. Quantitative details
We extend the ablation study from the main paper, providing detailed statistics in Table 9 and Table 10. These tables offer insights into the average and standard deviation of performance metrics across HIM2K [49] and M-HIM2K datasets. Our model not only achieves competitive average results but also maintains low variability in performance across different error metrics. Additionally, we include the Sum Absolute Difference (SAD) metric, aligning with previous image matting benchmarks.
Comprehensive quantitative results comparing our model with baseline methods on HIM2K and M-HIM2K are presented in Table 12. This analysis highlights the impact of mask quality on matting output, with our model demonstrating consistent performance even with varying mask inputs.
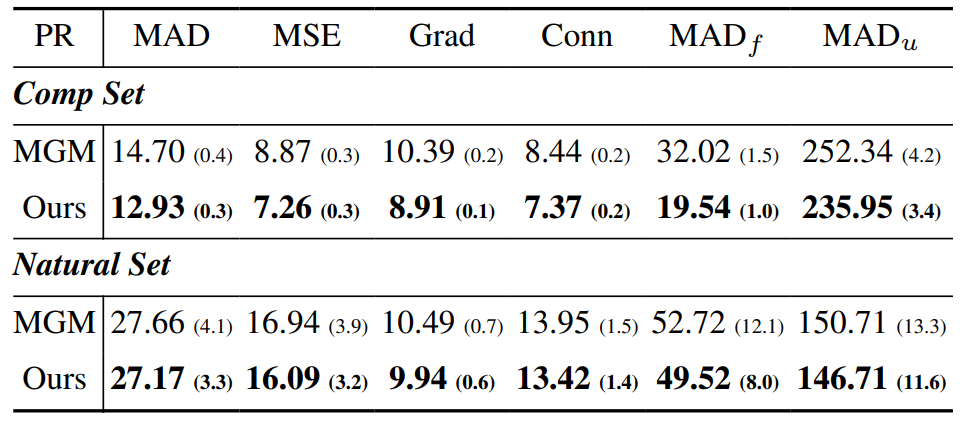
We also perform another experiment when the MGMstyle refinement replaces our proposed sparse guided progressive refinement. The Table 11 shows the results where our proposed method outperforms the previous approach in all metrics.

Authors:
(1) Chuong Huynh, University of Maryland, College Park ([email protected]);
(2) Seoung Wug Oh, Adobe Research (seoh,[email protected]);
(3) Abhinav Shrivastava, University of Maryland, College Park ([email protected]);
(4) Joon-Young Lee, Adobe Research ([email protected]).
This paper is